

 联系我们
联系我们

工博士机器人技术有限公司是一家集研发、生产、销售、技术服务于一体的专注于自动化、智能化设备生产和机器人系统集成应用的科技型企业,与ABB、库卡KUKA、发那科FANUC、安川YASKAWA、欧地希OTC、川崎Kawasaki、遨博AUBO、现代HYUNDAI、电装DENSO、欧姆龙OMRON、爱普生EPSON等机器人公司签订了战略合作关系。
公司业务范围:
◆机器人本体及配套产品销售、机器人应用技术培训服务;
◆机器人在焊接、切割、搬运、激光技术、机床上下料、钣金折弯、锻造等领域的系统集成应用;
◆机器人变位机、导轨、防护工作房、焊接工装夹具等系统周边设备的设计和生产。
地址:上海市嘉定区南翔镇众仁路399号B座20楼2007室(王工:18616566200)
----------------------------------------------------------------------------------------------------------
库卡机器人
KUKA机器人可以通过结构体声明变量,针对某些特殊的过程控制中涉及到的模拟量计算,视觉处理等就可以通过声明结构体变量进行分类声明,因为在处理过程中所涉及到的变量数据类型可能互不相同。
1.在使用结构体之前需要进行声明。 库卡机器人
STRUC CAR_TYPE INT motor, REAL price, BOOL air_condition
2.在结构中可使用简单的数据类型 INT、REAL、BOOL 及 CHAR
STRUC CAR_TYPE INT motor, REAL price, BOOL air_condition
3.在结构中可以嵌入数组
STRUC CAR_TYPE INT motor, REAL price, BOOL air_condition, CHAR car_model[15] 库卡机器人
4.在机构中可以使用位置POS等数据
STRUC CAR_TYPE INT motor, REAL price, BOOL air_condition, POS car_pos
5.定义完结构后还必须对此声明工作变量
STRUC CAR_TYPE INT motor, REAL price, BOOL air_conditionDECL CAR_TYPE my_car
6.结构体内变量的初始化
my_car={motor 50, price 149库卡机器人99.95, air_condition=TRUE}
项目应用实例:

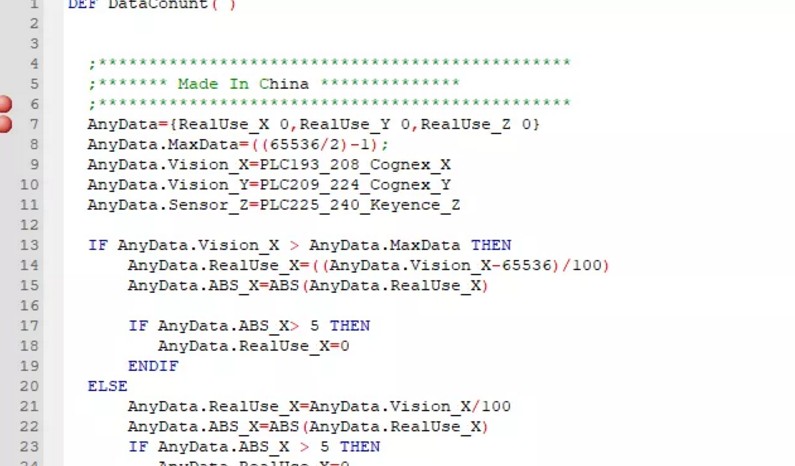
更多咨询:库卡机器人

