

 联系我们
联系我们

库卡机器人知识之伺服电机——库卡机器人代理
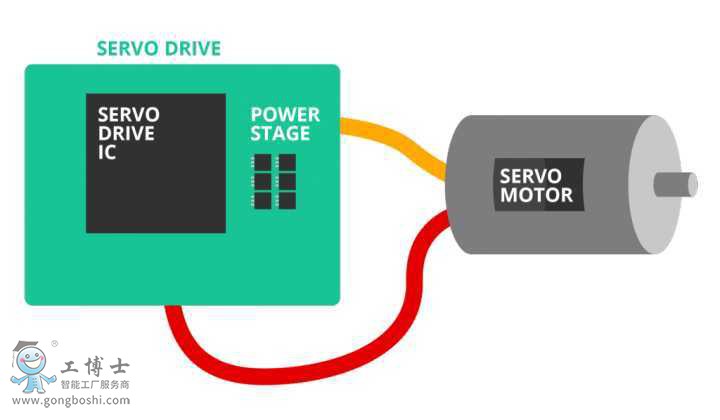
伺服驱动器是一种自动设备,它接收指令信号并将其与伺服机构的反馈进行比较,以便向伺服电机提供所需的电压,以纠正与 指令状态的任何偏差。声明:本媒体部分图片、文章来源于网络
版权归原作者所有,如有侵权,请与我联系删除。
工业革命标志着人类社会历史的一个重大转折。风车,熔炉,锅炉以及后由操作员无法调节的蒸汽机的开发需要自动控制。
詹姆士·瓦特(James Watt)在使用术语“伺服电动机”之前就已经开发了用于调节蒸汽机速度的飞球调速器,尼古拉·特斯拉(Nikola Tesla)使用电接触器“伺服电动机”在波托马克河上对模型船的“无线控制”进行了试验。远程模型。
有集成式电机控制电子装置的机器人关节在易用性,降低布线成本和EMI方面具有巨大优势。探索如何克服热量产生,安全性和集成性方面常见的问题。
市场上大多数针对工业应用而设计的现成控制器。这种类型的伺服驱动器的目的是覆盖尽可能多的反馈类型和通信总线,以便它们可以覆盖大多数应用程序,但这特别是对于集成机器人关节有缺点。
为事先计划了轨迹的工业机器设计的伺服驱动器不会优先考虑通信延迟。小型工业伺服驱动器仍然比将其集成到机器人关节中所需的驱动器大得多。与用于电机集成的伺服驱动器相比,该驱动器重量较重。
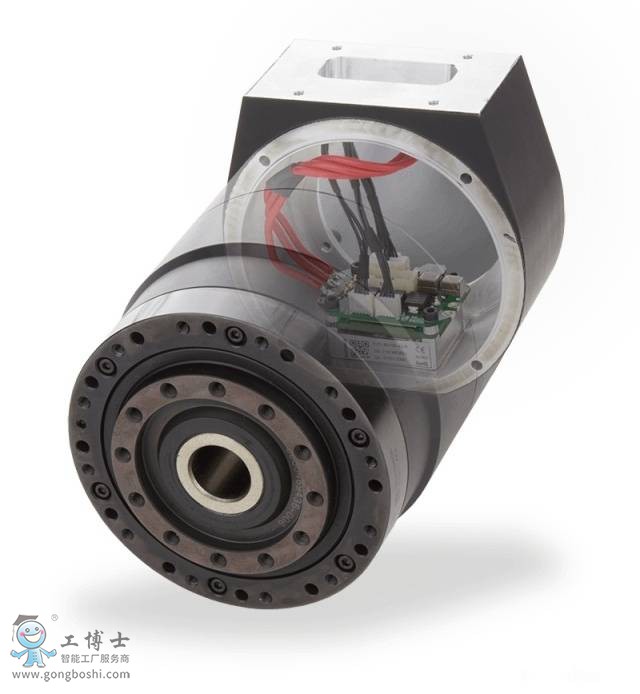
集成机器人关节的伺服驱动器
用于集成电机的PEVE伺服驱动器采用新的半导体技术进行设计和制造,以实现低的待机功耗以及优化的DSP技术以实现高定位精度。

启用安全的机器人关节
大多数机器人都基于来自机器人关节的扭矩反馈来执行安全功能。此扭矩测量既可以用应变计或具有角度传感器来完成。通过监视机器人关节施加的扭矩,可以控制机器人手臂在机器周围向患者或用户施加的力,以免对任何人造成伤害。
常见的实现方式是使用电动机控制器,该控制器可以读取扭矩传感器并将信息通过实时确定性EtherCAT总线反馈给主控制器。 我们为市场上功率密度高的机器人轴关节提供现成的和定制的解决方案。新型非硅晶体管的使用以及先进的栅极驱动器技术使我们能够提供高达0.21 W / mm3的功率密度,这比我们接近的竞争对手高出175%,比其他伺服器高出700%驱动供应商。
这种高功率密度使电机控制器的集成成为可能,就像以前不可能实现的那样,如外科机器人或人形机器人手腕和手指的手臂执行器末端。
更多资讯:库卡机器人
- 下一篇:库卡机器人电气部分自测(附答案)
- 上一篇:库卡机器人编程之程序库——库卡机器人代理